Concurrency¶
Concurrency ≠ Parallelism¶
Concurrency allows to create a well structured program
Parallelism allows to create a high performance program
Multiple cores/processors are...
possible for concurrent programs
essential to parallelism
What about Ada and SPARK?
GNAT runtimes for concurrency available on single core & multicore (for SMP platforms)
parallel features scheduled for inclusion in Ada and SPARK 202x
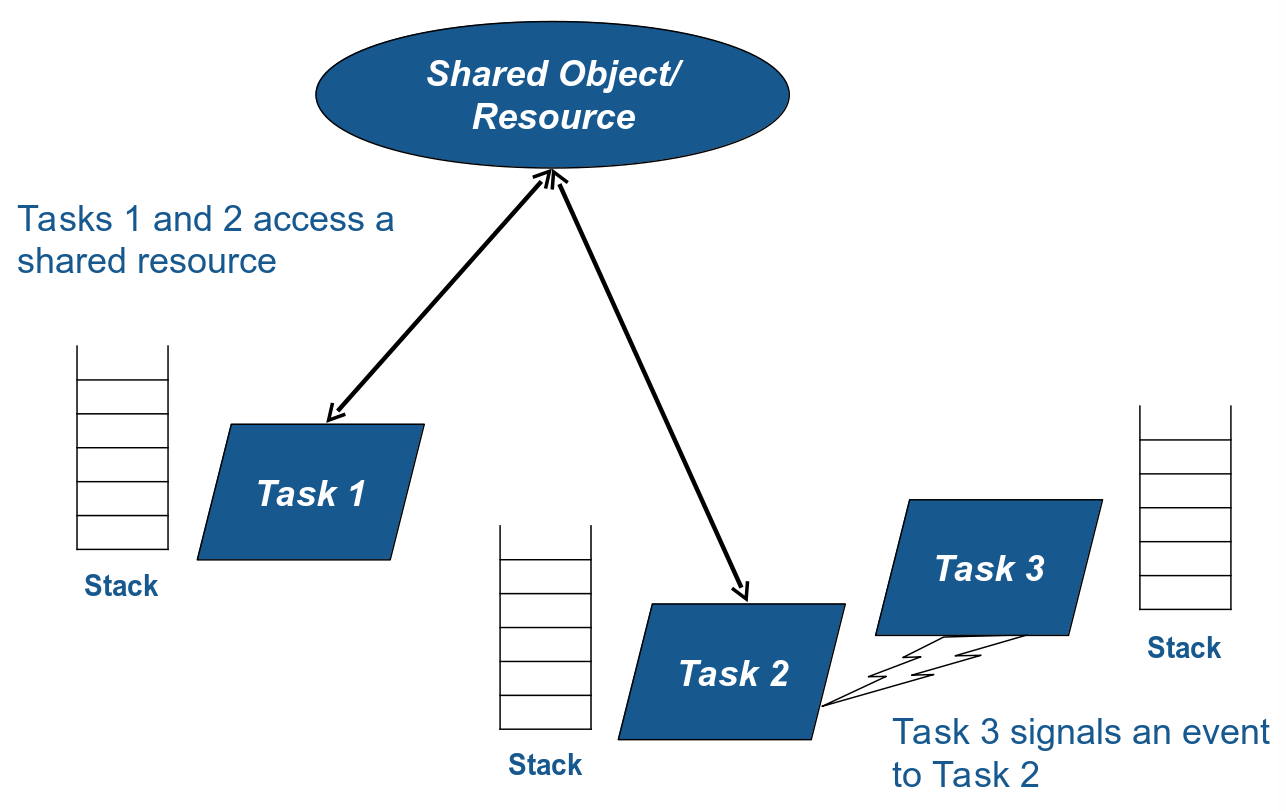
Concurrent Program Structure in Ada¶
The problems with concurrency¶
Control and data flow become much more complex
possibly nondeterministic even
actual behavior is one of many possible interleavings of tasks
Data may be corrupted by concurrent accesses
so called data races or race conditions
Control may block indefinitely, or loop indefinitely
so called deadlocks and livelocks
Scheduling and memory usage are harder to compute
Ravenscar – the Ada solution to concurrency problems¶
Ravenscar profile restricts concurrency in Ada
ensures deterministic behavior at every point in time
recommends use of protected objects to avoid data races
prevents deadlocks with Priority Ceiling Protocol
allows use of scheduling analysis techniques (RMA, RTA)
facilitates computation of memory usage with static tasks
GNAT Extended Ravenscar profile lifts some restrictions
still same benefits as Ravenscar profile
removes painful restrictions for some applications
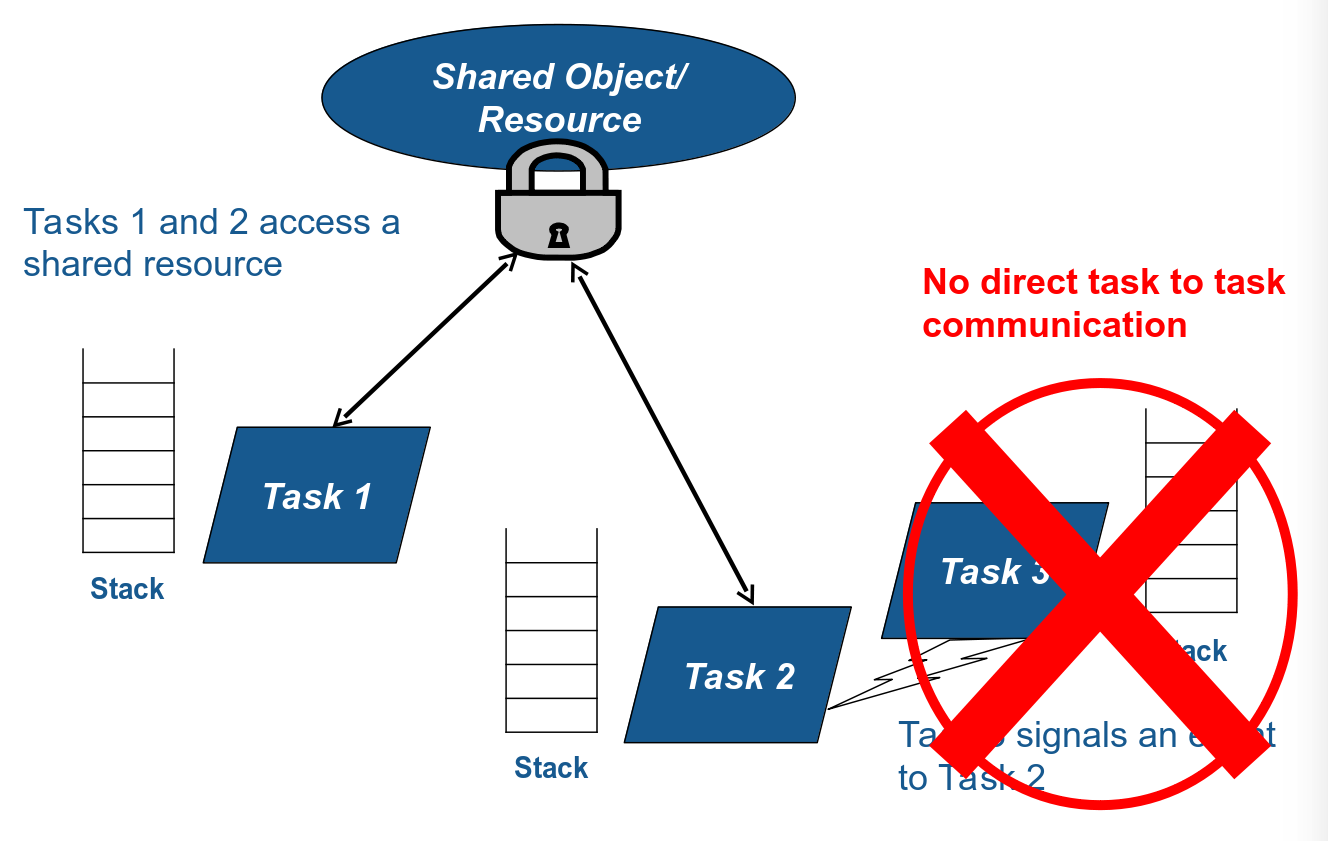
Concurrent Program Structure in Ravenscar¶
Ravenscar – the SPARK solution to concurrency problems¶
Ravenscar and Extended_Ravenscar profiles supported in SPARK
Data races prevented by flow analysis
ensures no problematic concurrent access to unprotected data
flow analysis also ensures non-termination of tasks
Run-time errors prevented by proof
includes violations of the Priority Ceiling Protocol
Concurrency – A trivial example¶
package Show_Trivial_Task is
type Task_Id is new Integer;
task type T (Id : Task_Id);
T1 : T (0);
T2 : T (1);
end Show_Trivial_Task;
package body Show_Trivial_Task is
task body T is
Current_Task : Task_Id := Id;
begin
loop
delay 1.0;
end loop;
end T;
end Show_Trivial_Task;
Id can be written by
T1andT2at the same time
Setup for using concurrency in SPARK¶
Any unit using concurrency features (tasks, protected objects, etc.) must set the profile
pragma Profile (Ravenscar);
-- or
pragma Profile (GNAT_Extended_Ravenscar);
... plus an additional pragma
that ensures tasks start after the end of elaboration
pragma Partition_Elaboration_Policy (Sequential);
... which are checked by GNAT partition-wide
pragmas needed for verification even if not for compilation
Tasks in Ravenscar¶
A task can be either a singleton object or a type
no declarations of entries for rendez-vous
task T;
task type TT;
... completed by a body
infinite loop to prevent termination
task body T is
begin
loop
...
end loop;
end T;
Tasks are declared at library-level
... as standalone objects or inside records/arrays
type TA is array (1 .. 3) of TT;
type TR is record
A, B : TT;
end record;
Communication Between Tasks in Ravenscar¶
Tasks can communicate through protected objects
A protected object is either a singleton object or a type
all PO private data initialized by default in SPARK
package Show_Protected_Object is
protected P is
procedure Set (V : Natural);
function Get return Natural;
private
The_Data : Natural := 0;
end P;
end Show_Protected_Object;
package body Show_Protected_Object is
protected body P is
procedure Set (V : Natural) is
begin
The_Data := V;
end Set;
function Get return Natural is
(The_Data);
end P;
end Show_Protected_Object;
Protected Objects in Ravenscar¶
Protected objects are declared at library-level
... as standalone objects or inside records/arrays
The record type needs to be volatile, as a non-volatile type cannot contain a volatile component. The array type is implicitly volatile when its component type is volatile.
package Show_Protected_Object_Ravenscar is
protected type PT is
procedure Set (V : Natural);
function Get return Natural;
private
The_Data : Natural := 0;
end PT;
P : PT;
type PAT is array (1 .. 3) of PT;
PA : PAT;
type PRT is record
A, B : PT;
end record with Volatile;
PR : PRT;
end Show_Protected_Object_Ravenscar;
package body Show_Protected_Object_Ravenscar is
protected body PT is
procedure Set (V : Natural) is
begin
The_Data := V;
end Set;
function Get return Natural is
(The_Data);
end PT;
end Show_Protected_Object_Ravenscar;
Protected Communication with Procedures & Functions¶
CREW enforced (Concurrent-Read-Exclusive-Write)
procedures have exclusive read-write access to PO
functions have shared read-only access to PO
Actual mechanism depends on target platform
scheduler enforces policy on single core
locks used on multicore (using CAS instructions)
lock-free transactions used for simple PO (again using CAS)
Mechanism is transparent to user
user code simply calls procedures/functions
task may be queued until PO is released by another task
Blocking Communication with Entries¶
Only protected objects have entries in Ravenscar
Entry = procedure with
entryguard conditionsecond level of queues, one for each entry, on a given PO
task may be queued until guard is True and PO is released
at most one entry in Ravenscar
guard is a
Booleancomponent of PO in Ravenscar
package Show_Blocking_Communication is
protected type PT is
entry Reset;
private
Is_Not_Null : Boolean := False;
The_Data : Integer := 1000;
end PT;
end Show_Blocking_Communication;
package body Show_Blocking_Communication is
protected body PT is
entry Reset when Is_Not_Null is
begin
The_Data := 0;
end Reset;
end PT;
end Show_Blocking_Communication;
Relaxed Constraints on Entries with Extended Ravenscar¶
Proof limitations with Ravenscar
not possible to relate guard to other components with invariant
GNAT Extended Ravenscar profile lifts these constraints
and allows multiple tasks to call the same entry
package Show_Relaxed_Constraints_On_Entries is
protected type Mailbox is
entry Publish;
entry Retrieve;
private
Num_Messages : Natural := 0;
end Mailbox;
end Show_Relaxed_Constraints_On_Entries;
package body Show_Relaxed_Constraints_On_Entries is
Max : constant := 100;
protected body Mailbox is
entry Publish when Num_Messages < Max is
begin
Num_Messages := Num_Messages + 1;
end Publish;
entry Retrieve when Num_Messages > 0 is
begin
Num_Messages := Num_Messages - 1;
end Retrieve;
end Mailbox;
end Show_Relaxed_Constraints_On_Entries;
Interrupt Handlers in Ravenscar¶
Interrupt handlers are parameterless procedures of PO
with aspect
Attach_Handlerspecifying the corresponding signalwith aspect
Interrupt_Priorityon the PO specifying the priority
with System; use System;
with Ada.Interrupts.Names; use Ada.Interrupts.Names;
package Show_Interrupt_Handlers is
protected P with
Interrupt_Priority =>
System.Interrupt_Priority'First
is
procedure Signal with
Attach_Handler => SIGHUP;
end P;
end Show_Interrupt_Handlers;
Priority of the PO should be in
System.Interrupt_Prioritydefault is OK – in the range of
System.Interrupt_Prioritychecked by proof (default or value of
PriorityorInterrupt_Priority)
Other Communications Between Tasks in SPARK¶
Tasks must communicate through synchronized objects
atomic objects
protected objects
suspension objects (standard
Booleanprotected objects)
Constants are considered as synchronized
this includes variables constant after elaboration (specified with aspect
Constant_After_Elaboration)
Single task or PO can access an unsynchronized object
exclusive relation between object and task/PO must be specified with aspect
Part_Of
Data and Flow Dependencies of Tasks¶
Input/output relation can be specified for a task
as task never terminates, output is understood while task runs
task itself is both an input and an output
implicit
In_Out => Texplicit dependency
package Show_Data_And_Flow_Dependencies is
X, Y, Z : Integer;
task T with
Global => (Input => X,
Output => Y,
In_Out => Z),
Depends => (T => T,
Z => X,
Y => X,
null => Z);
end Show_Data_And_Flow_Dependencies;
State Abstraction over Synchronized Variables¶
Synchronized objects can be abstracted in synchronized abstract state with aspect
Synchronous
package Show_State_Abstraction with
Abstract_State => (State with Synchronous, External)
is
protected type Protected_Type is
procedure Reset;
private
Data : Natural := 0;
end Protected_Type;
task type Task_Type;
end Show_State_Abstraction;
package body Show_State_Abstraction with
Refined_State => (State => (A, P, T))
is
A : Integer with Atomic, Async_Readers, Async_Writers;
P : Protected_Type;
T : Task_Type;
protected body Protected_Type is
procedure Reset is
begin
Data := 0;
end Reset;
end Protected_Type;
task body Task_Type is
begin
P.Reset;
A := 0;
end Task_Type;
end Show_State_Abstraction;
Synchronized state is a form of external state
Synchronoussame asExternal => (Async_Readers, Async_Writers)tasks are not volatile and can be part of regular abstract state
Synchronized Abstract State in the Standard Library¶
Standard library maintains synchronized state
the tasking runtime maintains state about running tasks
the real-time runtime maintains state about current time
package Ada.Task_Identification with
SPARK_Mode,
Abstract_State =>
(Tasking_State with Synchronous,
External => (Async_Readers, Async_Writers)),
Initializes => Tasking_State
package Ada.Real_Time with
SPARK_Mode,
Abstract_State =>
(Clock_Time with Synchronous,
External => (Async_Readers, Async_Writers)),
Initializes => Clock_Time
API of these units refer to
Tasking_StateandClock_Time
Code Examples / Pitfalls¶
Example #1¶
procedure Rendezvous is
task T1 is
entry Start;
end T1;
task body T1 is
begin
accept Start;
end T1;
begin
T1.Start;
end Rendezvous;
This code is not correct. Task rendezvous is not allowed; violation of
restriction Max_Task_Entries = 0. A local task is not allowed;
violation of restriction No_Task_Hierarchy
Example #2¶
package Example_02 is
protected P is
entry Reset;
end P;
private
Data : Boolean := False;
end Example_02;
package body Example_02 is
protected body P is
entry Reset when Data is
begin
null;
end Reset;
end P;
end Example_02;
This code is not correct. Global data in entry guard is not allowed.
Violation of restriction Simple_Barriers (for Ravenscar) or
Pure_Barriers (for Extended Ravenscar)
Example #3¶
package Example_03 is
protected P is
procedure Set (Value : Integer);
end P;
private
task type TT;
T1, T2 : TT;
end Example_03;
package body Example_03 is
Data : Integer := 0;
protected body P is
procedure Set (Value : Integer) is
begin
Data := Value;
end Set;
end P;
task body TT is
Local : Integer := 0;
begin
loop
Local := (Local + 1) mod 100;
P.Set (Local);
end loop;
end TT;
end Example_03;
This code is not correct. Global unprotected data accessed in protected object shared between tasks
Example #4¶
package Example_04 is
protected P is
procedure Set (Value : Integer);
end P;
private
Data : Integer := 0 with Part_Of => P;
task type TT;
T1, T2 : TT;
end Example_04;
package body Example_04 is
protected body P is
procedure Set (Value : Integer) is
begin
Data := Value;
end Set;
end P;
task body TT is
Local : Integer := 0;
begin
loop
Local := (Local + 1) mod 100;
P.Set (Local);
end loop;
end TT;
end Example_04;
This code is correct. Data is part of the protected object state. The
only accesses to Data are through P.
Example #5¶
package Example_05 is
protected P1 with Priority => 3 is
procedure Set (Value : Integer);
private
Data : Integer := 0;
end P1;
protected P2 with Priority => 2 is
procedure Set (Value : Integer);
end P2;
private
task type TT with Priority => 1;
T1, T2 : TT;
end Example_05;
package body Example_05 is
protected body P1 is
procedure Set (Value : Integer) is
begin
Data := Value;
end Set;
end P1;
protected body P2 is
procedure Set (Value : Integer) is
begin
P1.Set (Value);
end Set;
end P2;
task body TT is
Local : constant Integer := 0;
begin
loop
P2.Set (Local);
end loop;
end TT;
end Example_05;
This code is correct. Ceiling_Priority policy is respected. Task
never accesses a protected object with lower priority than its active
priority. Note that PO can call procedure or function from another PO, but
not an entry (possibly blocking).
Example #6¶
package Example_06 is
protected type Mailbox is
entry Publish;
entry Retrieve;
private
Not_Empty : Boolean := True;
Not_Full : Boolean := False;
Num_Messages : Natural := 0;
end Mailbox;
end Example_06;
package body Example_06 is
Max : constant := 100;
protected body Mailbox is
entry Publish when Not_Full is
begin
Num_Messages := Num_Messages + 1;
Not_Empty := True;
if Num_Messages = Max then
Not_Full := False;
end if;
end Publish;
entry Retrieve when Not_Empty is
begin
Num_Messages := Num_Messages - 1;
Not_Full := True;
if Num_Messages = 0 then
Not_Empty := False;
end if;
end Retrieve;
end Mailbox;
end Example_06;
This code is not correct. Integer range cannot be proved correct.
Example #7¶
package Example_07 is
protected type Mailbox is
entry Publish;
entry Retrieve;
private
Num_Messages : Natural := 0;
end Mailbox;
end Example_07;
package body Example_07 is
Max : constant := 100;
protected body Mailbox is
entry Publish when Num_Messages < Max is
begin
Num_Messages := Num_Messages + 1;
end Publish;
entry Retrieve when Num_Messages > 0 is
begin
Num_Messages := Num_Messages - 1;
end Retrieve;
end Mailbox;
end Example_07;
This code is correct. Precise range obtained from entry guards allows to prove checks.
Example #8¶
package Example_08 is
Max : constant := 100;
type Content is record
Not_Empty : Boolean := False;
Not_Full : Boolean := True;
Num_Messages : Natural := 0;
end record with Predicate =>
Num_Messages in 0 .. Max
and Not_Empty = (Num_Messages > 0)
and Not_Full = (Num_Messages < Max);
protected type Mailbox is
entry Publish;
entry Retrieve;
private
C : Content;
end Mailbox;
end Example_08;
package body Example_08 is
protected body Mailbox is
entry Publish when C.Not_Full is
Not_Full : Boolean := C.Not_Full;
Num_Messages : Natural := C.Num_Messages;
begin
Num_Messages := Num_Messages + 1;
if Num_Messages = Max then
Not_Full := False;
end if;
C := (True, Not_Full, Num_Messages);
end Publish;
entry Retrieve when C.Not_Empty is
Not_Empty : Boolean := C.Not_Empty;
Num_Messages : Natural := C.Num_Messages;
begin
Num_Messages := Num_Messages - 1;
if Num_Messages = 0 then
Not_Empty := False;
end if;
C := (Not_Empty, True, Num_Messages);
end Retrieve;
end Mailbox;
end Example_08;
This code is correct. Precise range obtained from predicate allows to prove checks. Predicate is preserved.
Example #9¶
--% src_file: Example_09.ads
--% cflags: -gnaty
--% make_flags: -gnaty -gnata
package Example_09 is
package Service with
Abstract_State => (State with External)
is
procedure Extract (Data : out Integer) with
Global => (In_Out => State);
end Service;
private
task type T;
T1, T2 : T;
end Example_09;
package body Example_09 is
package body Service with
Refined_State => (State => Extracted)
is
Local_Data : constant Integer := 100;
Extracted : Boolean := False;
procedure Extract (Data : out Integer) is
begin
if not Extracted then
Data := Local_Data;
Extracted := True;
else
Data := Integer'First;
end if;
end Extract;
end Service;
task body T is
X : Integer;
begin
loop
Service.Extract (X);
end loop;
end T;
end Example_09;
This code is not correct. Unsynchronized state cannot be accessed from multiple tasks or protected objects.
Example #10¶
package Example_10 is
package Service with
Abstract_State => (State with Synchronous, External)
is
procedure Extract (Data : out Integer) with
Global => (In_Out => State);
private
protected type Service_Extracted is
procedure Set;
function Get return Boolean;
private
Extracted : Boolean := False;
end Service_Extracted;
end Service;
private
task type T;
T1, T2 : T;
end Example_10;
package body Example_10 is
package body Service with
Refined_State => (State => Extracted)
is
Local_Data : constant Integer := 100;
Extracted : Service_Extracted;
protected body Service_Extracted is
procedure Set is
begin
Extracted := True;
end Set;
function Get return Boolean is
(Extracted);
end Service_Extracted;
procedure Extract (Data : out Integer) is
Is_Extracted : constant Boolean := Extracted.Get;
begin
if not Is_Extracted then
Data := Local_Data;
Extracted.Set;
else
Data := Integer'First;
end if;
end Extract;
end Service;
task body T is
X : Integer;
begin
loop
Service.Extract (X);
end loop;
end T;
end Example_10;
This code is correct. Abstract state is synchronized, hence can be accessed from multiple tasks and protected objects.